آشکارسازی و مقابله با سیگنال فریب در گیرنده GPS
چکیده
امروزه سیگنال فریب در گیرنده GPS از مهمترين و خطرناک ترين تهديدهای پیش روی گیرنده GPS است که اطلاعات نادرست به گیرنده می دهد و مشکلاتی را در محاسبات زمانی و مکانی ايجاد میکند.
مقابله با فريب از امور مهم در تحقیقات حوزه GPS میباشد.
در اين مقاله دو روش برای آشکارسازی و جبران اثر سیگنال فريب ارائه میشود.
فیلتر کالمن و شبکه عصبی بازگشتی از ابزارهای پیش بینی هستند که برای رسیدن به هدف از آنهااستفاده می شوند.
فیلتر کالمن و شبکه عصبی بازگشتی از تخمین گرهای ساده و قابل پیاده سازی روی پردازنده های ارزان قیمت به حساب می آيند.
الگوريتم های پیشنهادی همچنین از يک ضريب کاهشای تطبیقی برای جبران اثر فريب استفاده می نمايند.
نتايج شبیه سازی روی دادهای واقعیاز يک گیرنده تک فرکانسه GPS ، نشان می دهند که الگوريتم های پیشنهادی مبتنی بر فیلتر کالمن و شبکه عصبی بازگشتی در آشکارسازی وقوع فريب کاملا موفق می باشند.
و می توانند اثر فريب را، به ترتیب به میزان 33 و 63 درصد جبران نمايند.
تمام متد دريافتی هر يک ثانیه به روز می شوند و هارد و الگوريتم به صورت بلادرنگ عمل
می نمايند.
واژه های کلیدی:
سیگنال فريب، شبه فاصله، شبکه های عصبی، فیلتر کالمن، GPS تفاضلی کاربردهای نظامی و غیارنظامی بسیاری دارند.
و به طور روزمره در بسیاری از وسايل مورد استفاده قرار میگیرند.
از اين رو بررسی تهديدهای احتمالی و رفع آن ها ازمهمترين موارد پیشرو است.
از گیرنده های GPS درحوزه های گوناگون نظامی و غیرنظامی استفاده می شود.
تحقیقات زيادی در زمینه ی انحصاری نمودن گیرنده های GPS و سوء استفاده از اين سیستم در کشورهای مختلف انجام می شود.
سیگنال فریب
سیگنال فريب امروزه از مهمترين تهديدهای پیشروی گیرنده های GPS می باشدکه مشکلاتی را در محاسبات GPS ايجاد میکند.
اين سیگنال برای منحرف کردن گیرنده های دشمن و نیز ايجاد اختلال در آنها، به کار می رود. بنابراين، تشخیص و مقابله با چنین سیگنالی، چه در دفاع و چه در حمله امری بسیار مهم می باشد.
به طور کلی روش های مقابله با سیگنال فريب به دو دسته روشهای رمزنگاری و روش های غیررمزنگاری تقسیم می شوند.
روشهای رمزنگاری پیچیده است و عمدتاً نیاز به تغییر ساختار GPS دارند.
از اين رو به کارگیری اين روش ها با مشکلات بسیاری همراه است.
اما روش های غیررمزنگاری نسبت به روش های رمزنگاری ساده تر می باشند.
اين روش ها که عبارت اند از : آشکارسازی سیگنال نشانه، شکل دهی پرتو چند آنتنه و بررسی صحت استقلال گیرنده، نیاز به تغییر ساختار GPS ندارند.
و صرفاً بر اساس مشخصات سیگنال دريافتی، به آشکارسازی و جبران اثر فريب می پردازند.
عدم نیاز به تجهیزات گران قیمت ويژگی ديگر روش های غیر رمزنگاری می باشد.
از متداول ترين ابزارهای پیش بینی، می توان به فیلتر کالمن و شبکه عصبی اشاره کرد.
اين ابزارها علاوه بر دارا بودن خاصیت پیش بینی، خود تصحیح نیز می باشند و از اين رو
ابزارهای مناسبی برای آشکارسازی و جبران سیگنال فريب به شمار می روند.
به دلیل ويژگی هایی که در بالا بیان شد و نیز قابلیت پیاده سازی الگوريتم های مبتنی بر فیلتر کالمن و شبکه عصبی روی پردازنده های ديجیتال ارزان قیمت، در اين مقاله دو الگوريتم آشکار سازی و جبران سیگنال فريب مبتنی بر اين دو ابزار پیش نهاد می شود.
اين الگوريتم ها دارای داده های شبه فاصله يک سیستم مبتنی بر GPS2 تفاضلی می باشد.
ساختار مقاله پیش رو به اين صورت است که در ادامه و در بخش بعد، مفاهیم مرتبط با GPS مطالعه می شود.
بخش های بعدی نیز به ترتیب به بررسی سیگنال فريب، معرفی روش های مقابله با فريب،
بحث پیرامون فیلتر کالمن، شبکه های عصبی بازگشتی، ارائه الگوريتم های پیشنهادی برای حل مسئله و نتايج شبیه سازی اختصاص خواهند داشت.
مفاهیم مرتبط با GPS
در الگوريتم های پیشنهادی ، از آشکارسازی و جبران فريب از مفاهیمی چون شبه فاصله و GPS تفاضلی، بهره می گیرد.
از آنجايی که آشنايی با اين مفاهیم برای درک بهتر بخش های آتی ضروری می باشد، اين بخش به معرفی مفاهیم شبه فاصله و GPS تفاضلی می پردازد.
شبه فاصله
در بخش های بعدی، شبه فاصله را به عنوان مرجع آشکارسازی فريب به کار خواهیم برد، لذا آشنايی با طريقه محاسبه آن لازم و ضروری است.
فاصله بین ماهواره و گیرنده را که به کمک اندازه گیری تاخیر در دريافت سیگنال به دست می آيد، شبه فاصله گويند.
روش اندازهگیری بدين صورت است که ماهواره، کد شبه تصادفی را تولید و ارسال می کند. گیرنده نیز کد مشابهی را تولید می نمايد.
اندازه گیری تاخیر Δt کدهای شبه تصادفی توسط يک آشکارساز همبسته انجام می گیرد.
به محض انطباق کدهای گیرنده و فرستنده، تأخیر حلقه اندازه گیری، محاسبه می شود و با ضرب کردن آن در سرعت نور، شبه فاصله به دست می آيد.
يک قاعده کلی برای دقت اندازهگیری در روش شبه فاصله، 2 %دوره تناوب کد دريافتی است.
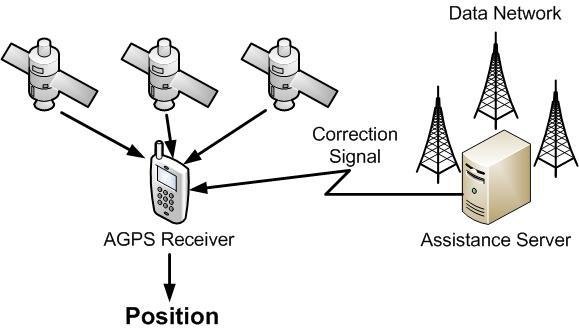
برای مقابله با برخی از خطاها و بالا بردن دقت سیستم موقعیت يابی، از روش GPS تفاضلی استفاده می کنند.
گیرنده ها با استفاده از سیگنال های دريافتی از ماهواره، موقعیت خود را به دست می آورد و با موقعیت واقعی مقايسه می کند.
با اين کار، خطای سیستم به دست می آيد و به دنبال آن، اطلاعات لازم برای تصحیح خطا در اين نقطه محاسبه می شود و برای ديگر گیرنده های GPS موجود در محل، ارسال می گردد.
دريافت سیگنال تصحیح، محاسبات خود را اصلاح می کنند.
با اين روش دقت موقعیت يابی ساکن و دقت موقعیت يابی متحرک را بهبود می بخشند.
فریب در GPS
اعلام گزارشی در سال 9992 از سوی وزارت حمل ونقل آمريکا مبنی بر آسیب پذيری زير ساخت حمل ونقل اين کشور به تهديدهای سیستمهای ناوبری سبب جلب توجه بیش از پیش محققان به مسئله فريب در سیستم های ناوبری، شد.
در آن زمان تحقیقات کمی در اين حوزه انجام می شد.
بدين ترتیب اين مسئله سبب شد که آزمايشگاههايی در چند دانشگاه معتبر دنیا به صورت تخصصی در زمینه فريب و روشهای مقابله با آن، مشغول به تحقیق شوند.
“فرياب و گامراهی ” هر دو از جمله حملات فعال محسوب می شوند.
فريب از نوع حمالت فعال نقاب دار، و گمراهی گونه خاصی از فريب از نوع حمالت فعال بازخوانی است.
درحمله گمراهی،سیگنالهای ناوبری تسخیرمی شود و دوباره روی فرکانس دريافتی
ارسال می شوند ، که اين عمل سبب اختلال در گیرنده می شود و درنتیجه، مختصات اشتباه به گیرنده می دهیم.
درحالی که فريب ارسال سیگنال هايی با ساختار مشابه با سیگنال های ناوبری اصلی برای تحت کنترل گرفتن حلقه رديابی گیرنده است.
در میان انواع حمله ها، فريب به عنوان خطرناک ترين دخالت عمدی می باشد که به موجب آن، گیرنده GPS با رديابی سیگنال های جعلی فريب می خورد.
حمله فريب از حمله جمینگ خطرناک تر است
حمله فريب از حمله جمینگ خطرناک تر است زيرا گیرنده نمی تواند حمله فريب را تشخیص بدهد.
فريب به دلیل اين که مخفیانه می باشد، حمله ای بسیار ظريف تر نسبت به حملاتی نظیر ايجاد مانع در برابر سیگنال و يا جمینگ است.
به طور کلی، فريب حملهای پنهانی است که در آن فريب دهنده با تولید سیگنالی جعلی شبیه به سیگنال اصلی، گیرنده را در اندازه گیری مکانی و زمانی گمراه می کند.
مطالعات در مورد واکنش انواع گیرنده های GPS در مقابل تهديدهای سیگنال فريب نشان
می دهد که چنین حمله ای بر اندازه گیریهای گیرنده، اثرات بسیار مخربی دارد.
حملات فريب به سه دسته اصلی ، ساده و متوسط و پیچیده تقسیم می شوند.
در حملات ساده، يک شبیه ساز سیگنال های ناوبری، سیگنال های جعلی را با توان باال به سمت گیرنده هدف ارسال می کند.
شناسايی اين حمله به راحتی امکان پذير است چرا که هیچ همزمانی بین سیگنال های جعلی و سیگنال های اصلی وجود ندارد.
در حمالت سطح متوسط، فريب دهنده سیگنال های جعلی را به صورت همزمان شده با سیگنال های اصلی ارسال می کند.
مسئله همزمانی موجب می شود که امکان شناسايی اين حمله کاهش يابد.
در حمالت سطح پیچیده، حمله شامل شبکه ای از فريب دهنده ها می گردد.
اين عمل سبب می شود هم محتويات سیگنال های ناوبری دوباره ارسال شوند و هم اينکه حمله توزيع فضايی داشته باشد و از طريق آنتن های چندگانه قابل شناسايی نباشد.
از آنجايی که تا کنون حملات سطح متوسط، عملکرد موفقی داشته اند، امروزه اکثر تحقیقات در حوزه اين دسته از حملات بوده و توجه کمتری به حملات پیچیده می شود.
نمونه ای از نحوه اعمال فريب متوسط را به نمايش گذاشته است.
آشکارسازی و مقابله با سیگنال فریب
متاسفانه به دلیل پیچیدگی نحوه ايجاد سیگنال فريب و هوشمند بودن آن، روش های خیلی زيادی برای مقابله با آن وجود ندارد.
و روشهای مقابله، به دو دسته روش های رمزنگاری و روش های غیررمزنگاری محدود می- شوند.
روشهای رمزنگاری تکیه بر کدهای امنیتی غیرقابل پیش بینی دارند که در سیگنال های ناوبری قرار داده می شوند.
برای حمله به گیرنده های تجهیزشده با اين روش ها، فريبنده يا بايد بتواند کد امنیتی را پیش بینی کند و يا اينکه سیگنال ها را ذخیره و دوباره ارسال نمايد.
سه روش ضدفريب مبتنی بر رمزنگاری وجود دارد:
روش اول :
هنگام ردگیری کدهای L1C ،گیرنده مای تاواند زمان ارسال SSSC بعدی را پیش بینی کند، ولی نمی تواند دنباله و محتويات آن را پیش بینی نمايد.
با دريافت يک SSSC ،گیرنده نمونه های پیش روی آن را در حافظه ذخیره می کند.
بعد از مدتی کلید های رمزنگاری همراه با پیامهای ناوبری ارسال می شوند.
گیرنده با دريافت کلید، SSSC را رمزگشايی می کند و از آن و نمونه های ذخیره شده همبستگی می گیرد.
اگر همبستگی از يک مقدار آستانه پايین تر باشد، يک حمله فريب را شناسايی می کند.
روش دوم:
روش اعتبارسنجی پیام های NMA ناوبری 3 است که در اين روش، از امضای ديجیتال بر روی 4 پیام ناوبری غیرنظامی CNAV استفاده می شود.
ساختار پیام های CNAV قابل گسترش هستند. از اين رو نیازی به تغییر شکل پیامها نمی باشد.
روش سوم:
همبستگی کد (Y(P گیرندههای دوگانه می باشد که در آن، يک گیرنده در محل ايمنی قرار می گیرد و کدهای A/C و L1 را دنبال مینمايد.
اين گیرنده از رابطه فاز و زمان بین کدهای A/C و کدهای (Y(P استفاده می کند تا کدهای (Y(P را ايزوله و نمونه های خام يا تخمینی از کدهای W رمزشده را روی يک شبکه ايمن ارسال نمايد.
گیرنده دوم که هدف، حفاظت از آن است، همبستگی (Y(P استخراج شده را با نمونه ها يا کدهای W دريافتشده از گیرنده اول محاسبه می کند و اگر زير يک آستانه مشخص باشد يک حمله فريب شناسايی میشود.
در روش های غیررمزنگاری، نه از کدهای امنیتی و نه از يک ارتباط جانبی استفاده می شود. اين روش ها عموماً تکیه بر مشاهده تغییرات ويژگی های مختلف سیگنال دريافتی دارند. برخی از روشهای غیررمزنگاری بر اساس به کارگیری دو يا چند آنتن بنا نهاده شده اند.
به کارگیری آنتن های متعدد، هزينه های سیستم را افزايش می دهد.
از اين رو روش هايی که تکیه بر يک آنتن دارند، بیشتر مورد توجه قرار می گیرند.
به طور کلی اجرای يک يا چند مورد از اقدامات زير برای آشکارسازی سیگنال های GPS مشکوک به حمله فريب، الزامی است.
مشاهده توان سیگنال GPS :
اين اقدام شامل مشاهده و ثبت مقدار متوسط توان سیگنال می باشد.
مقدار مشاهده شده با مقدار مورد انتظار مقايسه می شود.
اگر مقدار اندازه گیری در سیگنال مشاهده شده از حد آستانه ای از پیش تعیین شده تجاوز کند، زنگ خطری از فريب برای کاربر به صدا در میآيد.
مشاهده تغییرات توان سیگنال GPS :
در اين اقدام، مقدار توان سیگنال دريافتی گیرنده، در هر زمان اندازه گیری و ثبت شده و با
مقدار ثبت شده در زمان قبل مقايسه می شود.
تغییرات زياد در اين اندازه ها می تواند نشان دهنده وجود فريب باشد.
بدين ترتیب به کاربر هشداری در رابطه با احتمال وقوع فريب داده میشود.
مشاهده تغییرات شبه فاصله:
در گیرنده هایGPS ،شبه فاصله برای مکانيابی به کار می رود، هرگونه تغییرات بزر و پیش بینی نشده در اندازه آن میتواند دلیل بر وجود فريب باشد.
ثبت اختلاف زماني: گیرندههای GPS ساعتهای نسبتاً دقیقی دارند.
با استفاده از اطالعات زمانی می توان از صحت سیگنال های دريافتی اطلاع پیدا کرد.
در صورت وجود اختالف زمانی زياد بین ساعت گیرنده و ساعت ماهواره، می توان احتمال وجود فريب را داد،اما اين مسئله بايد با دقت بیشتر بررسی گردد.
مشـاهده کـدهای شنـاسایي ماهواره و تعداد سیگنال
ماهوارههای دریافتي: مشاهده هرگونه اختالف در کد ماهواره ها يا مشاهده ماهواره مشکوک می تواند دلیل بر وجود فريب باشد.
روشهای اشاره شده در بالا به همراه روش های ديگر غیررمزنگاری و همچنین روش های رمزنگاری برای آشکارسازی و مقابله با فريب به کار می روند.
مقدار هزينه قابل قبول، حجم پردازش قابل قبول و البته داده های در دسترس برای پردازش، دارد.
اين مقاله تغییرات شبه فاصله را به عنوان شاخص وجود فريب برمی گزيند و از ابزارهای فیلتر کالمن و شبکه عصبی بازگشتی برای آشکارسازی فريب به کمک اين شاخص و جبران اثر فريب بر شبه فاصله، بهره میگیرد.
9 .فیلتر کالمن
يکی از شناخته شده ترين و پرکاربردترين ابزارهای رياضی موجود، که می توان از آن در تخمین و محاسبه فرآيندهای اتفاقی در اندازه گیری های محیط های نويزی استفاده کرد، ابزاری است که تحت عنوان فیلتر کالمن شناخته می شود.
نام فیلتر کالمن پس از آنکه رادولف کالمن مقاله مشهور خود، که يک راه حل بازگشتی برای
مسئله فیلترينگ خطی داده های گسسته بود را منتشر کرد، بر اين ابزار نهاده شد.
فیلتر کالمن مجموعه ای از معادلات و روابط رياضی است که به عنوان يک تخمین گر بهینه با خاصیت پیش بینی و تصحیح عمل می کند.
و اين عمل با کمینه کردن کوواريانس خطا انجام می شود.
از مزيت های اين فیلتر، آن است که محاسبه را برای حالت های مختلف زمانی اعم از گذشته، حال و آينده امکانپذير می سازد.
در فیلتر کالمن معادالت حالت سیستم و مقادير اندازه گیری در اختیار می باشند و از دو دسته معادله با نام معادلات به هنگام سازی زمانی و به روزرسانی اندازه گیری استفاده
می شود.
فیلتر کالمن يک فرآيند را با استفاده از بازخورد کنترلی تخمین می زند.
فیلتر، حالت فرآيند را در يک زمان پیش بینی و سپس بازخورد را به صورت يک اندازهگیری )از نوع نويزدار دريافت می کند.
معادلات به هنگامسازی زمانی را می توان به صورت معادالت پیش بینی کننده نیز در نظر گرفت.
اين درحالی است که معادلات به روزرسانی اندازه گیری به عنوان معادلات تصحیح گر در نظر گرفته می شوند.
مشخص است که الگوريتم تخمین نهايی، يک الگوريتم پیش بینی- تصحیح برای حل مسئله های عددی است.
و فیلترکالمن با استفاده از معادلات به هنگامسازی زمانی و به روزرسانی اندازه گیری،
تخمینی بهینه از حالت بعدی به ما می دهد.
بعد از هر بار به هنگام سازی زمان و اندازه گیری، فرآيند با استفاده از تخمین حالت پسین قبلی تکرار میشود.
بازگشتی بودن، يکی از بهترين ويژگی های فیلتر کالمن است.
اين موضوع پیاده سازی عملی اين فیلتر را بسیار امکان پذيرتر از پیاده سازی فیلتری که بر روی تمام داده ها به صورت مستقیم برای هر مرحله تخمین اجرا می شود، می گرداند.
در اين حالت، فیلتر کالمن به صورت بازگشتی تمام تخمین و پیش بینی کانونی را تنها با استفاده از اطلاعات حالات قبلی انجام می دهد.
2 .شبکه های عصبي بازگشتي
يک شبکه عصبی هوشمند شامل مجموعه ای از نرون ها است که به يک شکل خاص به هم متصل شده اند.
هر گره، حاصل سیگنالهای رسیده به خود را به شکل وزن دار جمع می کند و يک وزن خروجی را به ديگر گره ها می برد.
اتصال و جهت بین اليه های مختلف، نوع شبکه را مشخص می کند و در نتیجه، به روش آموزش مناسب اشاره می نمايد.
شبکه MLP معمولترين شبکه عصبی است که روش آموزش ساده و پیاده سازی مستقیمی نیز دارد.
برای شبکه های MLP ، سیگنالها از اليه ورودی به سمت خروجی ها در يک جهت پخش
می شوند.
بنابراين عمل های حافظه ای يا شبکه های پويا را نمايش نمی دهد.
شبکه RBF را می توان به عنوان يک شبکه مستقیم در نظر گرفت که از عمل های پايه ای در لايه های پنهان خود در مقايسه با فعالسازی Sigmoid در شبکه های معمولی MLP استفاده می کند.
هر گره خروجی وزن های جمع شده از همه نرون های پنهان را جمع می کند.
بنابراين نرون های پنهان فقط به شکل غیرخطی ورودی ها را از فضای ورودی به يک فضای جديد با يک پارامتر ثابت تبديل، نگاشت می دهند.
شبکه های عصبی بازگشتی دارای يک يا چند فیدبک از يک لايه مشخص هستند و برخلاف شبکه های MLP معمولی، می توانند الگوهای موقتی را به خاطر عمل حافظه ای متن ورودی ها تشخیص دهند.
از اين رو برای حل مسئله پیش بینی مناسب می باشند.
روش انتخاب ورودی ها و تابع های هدف در اين شبکه ها، بر سرعت پاس دهی شبکه، تاثیر چشم گیری دارد و به صورت کامال دلخواه وابسته به اولويت بندی می باشد.
با توجه به ويژگیهای فوق، در اين مقاله، شبکه عصبی بازگشتی برای حل مسئله پیش بینی و به منظور آشکارسازی و جبران سیگنال فريب به کار گرفته شده است.
1 .الگوریتمهای آشکارسازی و جبران فریب در بحث مقابله با سیگنال فريب، ابتدا بايد وجود فريب را آشکار کنیم و در مرحله بعد در صورت وجود فريب، آن را جبران نمايیم.
در اين مقاله با استفاده از ابزارهايی به نام های فیلتر کالمن و شبکه عصبی بازگشتی که در بخش های قبل به تفصیل به آن پرداخته شد، می خواهیم روشی برای آشکارسازی و جبران سیگنال فريب ارائه نمايیم.
روش های پیشنهادی بر پايه بهره گیری از داده های شبه فاصله يک سیستم مبتنی بر GPS تفاضلی بنا نهاده شده اند.
GPS تفاضلی
ايستگاههای GPS تفاضلی برای افزايش دقت و کاهش خطای گیرنده ها می باشد.
همینطور ايستگاه های GPS تفاضلی با فرستادن سیگنال تصحیح، به افزايش دقت گیرنده کمک می کنند.
اگر GPS تفاضلی مورد حمله سیگنال فريب قرار بگیرد، کیفیت سیگنال تصحیح کاهش می یابد.
از آنجايی که مکان ايستگاه های GPS تفاضلی ثابت می باشند، معمولا گیرنده های محدوده تحت پوشش آن ها مورد حمله های فريب قرار می گیرند.
در اين مقاله فرض بر اين است که يک گیرنده مبتنی بر GPS تفاضلی مورد حمله فريب قرار می گیرد.
اساس کار اين مقاله بر مقايسه مقدار شبه فاصله اندازه گیری و اطلاعات محاسبه ای GPS تفاضلی است.
که به عنوان ورودی ابزار پیش بینی فیلتر کالمن يا شبکه عصبی بازگشتی عمل می کند.
در اين مرحله، وظیفه ابزار پیش بینی، آشکارسازی وجود فريب است.
درصورتی که وجود فريب موجود باشد، در مرحله جبران سازی،شبه فاصله جبران می شود وسپس محاسبه می گردد.
در مرحله آشکارسازی، با شبه فاصله و مفاهیم مربوط به آن نمونه ای از شبکه های عصبی بازگشتی سروکار داريم.
نرخ تغییرات شبه فاصله را می توان با استفاده از مقايسه شبه فاصله در دو بازه زمانی متوالی به دست آورد:
اگر سیگنال GPS مورد فريب قرار گیرد، در مقدار شبه فاصله، تغییر ايجاد می شود.
اين تغییر در نرخ تغییرات شبه فاصله اثر میگذارد.
اگر فواصل زمانی بین اندازه گیری ها به اندازه کافی کم باشد، خطاهای يونسفری، تروپسفری و ساعت گیرنده قابل چشم پوشی هستند.
از آنجايی که ايستگاه GPS تفاضلی، اطلاعات درست مکانی ايستگاه و مدار ماهواره را در اختیار دارد، می تواند فاصله بین ماهواره و گیرنده را محاسبه کند.
اکنون شاخص (k(z را مطابق رابطه 3 تعريف میکنیم:
که در آن، Rs مبین بردار مکان ماهواره و Ru مبین بردار مکان گیرنده است.
در حالت عدم حضور فريب، با چرخش ماهواره به دور محور زمین، مقدار شبه فاصله و بردار مکان ماهواره تغییر میکند.
اگر مکان گیرنده را در ماحل ايستگاه و آن را ثابت فرض کنیم، مقدار (k(z تقريبا نزديک صفر خواهد شد.
حال اگر به سیستم، سیگنال فريب اعمال شود، اين نظم در سیستم از بین می رود و مقدار (k(z مخالف صفر می گردد.
در اين مقاله از اين ايده و روند برای تشخیص زمان اعمال سیگنال فريب و مقدار آن استفاده می کنیم؛
به اين ترتیب که (k(z را به عنوان ورودی شبکه عصبی در نظر می گیريم.
بعد از تعالیم اين شبکه و با توجه به اينکه از اين شبکه برای پیش بینی حالت بعد استفاده می کنیم، مقدار (k(z مورد پیش بینی ، درخروجی شبکه عصبی ظاهر می شود.
حال کافیست با تعیین يک مقداری خاص برای (k(z که آن را حد آستانه می نامیم، زمان وقوع و مقدار سیگنال فريب را تعیین نمايیم.
اما برای فیلتر کالمن، معادلات حالت و اندازه گیری را با فرض اينکه حرکت کاربر حرکت شتابدار با شتاب ثابت باشد، می نويسیم:
در روابط فوق، Xk مبین بردار حالت فرآيند و A مبین ماتريس
انتقال حالت است که از نوشتن معادلات حرکت شتابدار ثابت به دست می آيد. ∆ مبین فاصله زمانی بین دو اندازه گیری است.
Vk و Wk نیز به ترتیب مبین بردارهای نويز حالت و نويز اندازه گیری بوده و H مبین ماتريس ارتباط ايده آل بین بردار اندازه گیری و حاالت معادل، 0 0 1 مای باشد.
حاال با داشتان معادلات حالت و اندازه گیری می توانیم حلقه کالمن را تشکیل دهیم و يک پارامتر جديد به عنوان خروجی برای آشکارسازی فريب تعريف نمايیم.
اين پارامتر را که باقیمانده شبه فاصله مینامیم به صورت رابطه تعريف میکنیم:
تغییرات شبه فاصله ناشی از حرکت ماهواره ها در v باقی نمی ماند و از اين رو می توان يک حد آستانه آشکارسازی فريب تعیین کرد.
اين حد آستانه به صورت تجربی به دست می آيد. اگر مقدار v از حد آستانه بیشتر باشد نشان میدهد که فريب وجود دارد.
پس از انجام مرحله آشکارسازی اگر از وجود فريب آگاه شویم بايد جبران سازی صورت پذيرد.
همان طور که می دانید، اگر گیرنده هایی تحت حمله فريب قرار گیرد، نرخ تغییرات شبه فاصله اش افزايش می يابد.
اين نرخ تغییرات می تواند با استفاده از اختلاف بین مقدار اندازه گیری و مقدار پیش بینی در فیلتر کالمن يا شبکه عصبی جبران گردد.
در واقع اين اختلاف همان اثری است که سیگنال فريب بر روی سیستم می گذارد و برابر است با:α
α ضريبی است که به صورت تجربی به دست می آید.
اين ضريب متناسب با خطای شبه فاصله، تغییر می کند.
3 .نتایج شبیه سازی
جمع آوری متد مورد نیاز برای شبیه سازی را يک گیرنده تک فرکانس GPS و يک گیرنده GPS برنامه محور، انجام می دهد.
عوامل استخراجی ، شامل اندازه گیری شبه فاصله، فاز حامل و مکان دوازده ماهواره می باشند.
همان طور که قبلا ذکر شد، فريب نوع متوسط با ايجاد تأخیر در سیگنال دريافتی ايجاد
می شود.
اثر اين تأخیر در ماهواره های مورد شناسايی در بخش رهیابی و نیز در مقادير شبه فاصله ظاهر می شود.
پس از اعمال فريب، سه ماهواره معتبر کنار می روند و يک ماهواره نامعتبر اضافه می شود.
نحوه اعمال فريب، به اين صورت است که ابتدا يک مقدار معین به شبه فاصله اولین اطلاعات هدف، می افزاییم و سپس اين مقدار، متناسب با تغییرات شبه فاصله افزايش و يا کاهش می یابد.
در روشی ديگر می توان به جای افزايش پل های مقدار شبه فاصله اولین اطلاعات هدف، افزايش تدریجی شبه فاصله را جايگزين نمود.
پس از شبیه سازی الگوريتم های پیشنهادی، مشاهده می شودکه اين الگوريتم ها علاوه بر اينکه بلادرنگ عمل میکنند با توجه به بروز رسانی متد دريافتی در هر يک ثانیه، در فاز آشکار سازی نیز کامال و موفق عمل می نمايند.
بررسی اثربخشی الگوريتم های جبران سازی
برای بررسی اثربخشی الگوريتم های جبران سازی، مقدار موثر خطای شبه فاصله به عنوان معیار ارزيابی قبل و بعد از جبران سازی محاسبه شد.
نتايج نشان میدهند که الگوريتم مبتنی بر فیلتر کالمن اثر فريب را به میزان 33 درصد جبران می نماید.
بنابراين، روش دوم نسبت به روش نخست، کارايی نسبتاً بهتری در فاز جبران سازی از خود نشان می دهد.
همانطور که از نتايج شبیه سازی برمی آيد ،ويژگی الگوريتم ها در اين مقاله اين است که مستقل از شناسايی يا عدم شناسايی فريب در بخشهای رهیابی و رديابی صرفاً با کمک اطلاعات شبه فاصله به آشکارسازی و جبران فريب می پردازد.
1 .نتیجه گیری
در اين مقاله ابتدا مسئله فريب و روش های مقابله با آن را بررسی می کنیم.
سپس فیلتر کالمن و شبکه عصبی بازگشتی به عنوان دو ابزار کارا برای حل مسائل پیش بینی مورد بررسی قرار گرفتند.
اين ابزارها در عین سادگی، کارايی قابل قبولی در حل مسئله پیش بینی دارند.
به همین دلیل برای استفاده در الگوريتم مقابله با فريب، مورد توجه هستند.
الگوريتم های پیشنهادی اين مقاله،
علاوه بر داشتن قابلیت به کارگیری هم زمان برای چندين ماهواره،می توانند در تولید کد تصحیح ايستگاه های GPS تفاضلی نیز به کار روند.
اين الگوريتم ها از اطلاعات شبه فاصله برای آشکارسازی و جبران استفاده می کنند.
الگوریتم ها دارای سرعت پاس دهی بالايی بوده و با توجه به بروزرسانی عوامل در هر يک ثانیه، به صورت بلادرنگ عمل می نمايند.
هم چنین الگوريتم های پیشنهادی، قابل پیاده سازی روی پردازندههای ارزان قیمت می باشند.
نتايج شبیه سازی اعمال اين الگوريتم ها به داده های واقعی، نشان می دهند که موفقیت کامل آن ها در آشکارسازی فريب و قابلیت جبران، به ترتیب برای روش های مبتنی بر فیلتر کالمن 33 درصد و شبکه عصبی 63 درصد هستند.